
His upper frame restored, Microtron patiently awaits his next update - a power source.
His upper frame restored, Microtron patiently awaits his next update - a power source.

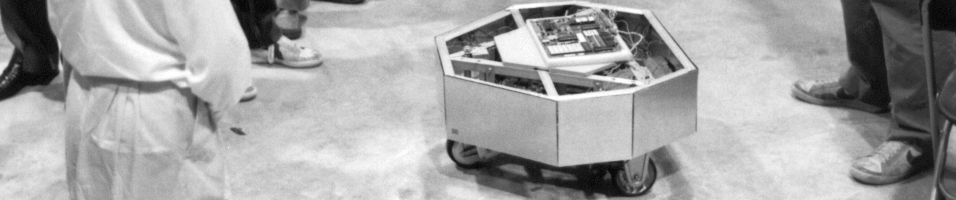
Microtron robot in 1983. The robot is facing to the left.
The photo above shows Microtron in all his fully-functional glory in 1983. Sometime in 1998, as part of an earlier restoration and clean-up effort, I removed the outer panels and the upper frame – as is visible in this more recent photo from 2009:

Microtron in 2009, fresh out of storage. Upper outer frame and panels are missing.
I decided that the first step in restoring functionality was to get the robot’s frame back together. Here are the original pieces, laid out in their proper order, ready to be bolted back together. Each piece is individually numbered (the number labels are on the inside of the pieces as is visible in the photo) – I merely followed the diagram from Tod’s original book:

upper frame pieces
A few nuts and bolts were missing, but I picked up replacements at a local hardware store. The new screws are identical to their 25 year old counterparts, except shinier. There were no problems in reassembling the upper outer frame, and here is Microtron with his now complete frame:

Microton with restored complete frame, 2009
Working with colleagues in 1956, Benjamin Bloom developed the idea of six levels of cognitive thinking, which he named Bloom’s Taxonomy. The levels, in order of lowest to highest thinking level, are knowledge; comprehension; application; analysis; evaluation; and synthesis. For information on Bloom’s Taxonomy, see
http://www.saskschools.ca/curr_content/adapthandbook/learner/cdbrain.html#blooms
Completed the speed control circuit.
diagram:
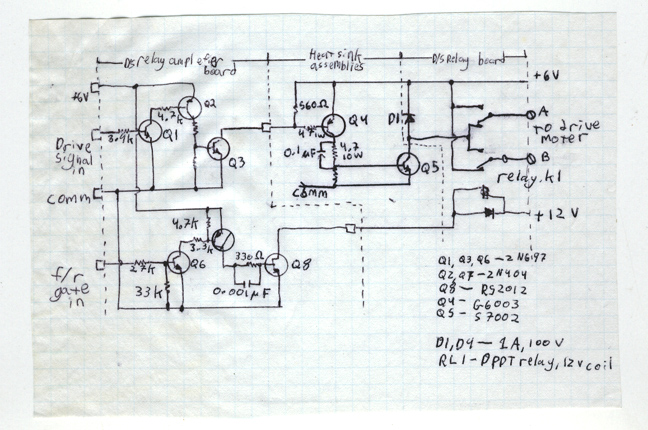
completed circuit, mounted on the right side of the triangular frame:


April 1977 Interface Age Magazine. Cover scan courtesy of The Vintage Computer
Tod Loofbourrow’s original Microtron robot (which he called “Mike”) was featured in the April 1977 issue of Interface Age magazine (PDF scan of article.). Prominently displayed on the cover, Tod’s “Mike” had at this point only reached the first stage of his development. Tod later added the eight-sided outer frames and impact sensors before writing his book about the robot.
Visible in this picture is the KIM-1 computer which controlled all the functions of the robot. In this early stage, the robot could be under joystick control, but later, after the impact sensors were installed, it was entirely self-directing.
 "How to build a computer-controlled robot" (amazon)
"How to build a computer-controlled robot" (amazon) 1977 Interface Age Article (pdf)
1977 Interface Age Article (pdf) ZagrosRobotics
ZagrosRobotics .nu
.nu