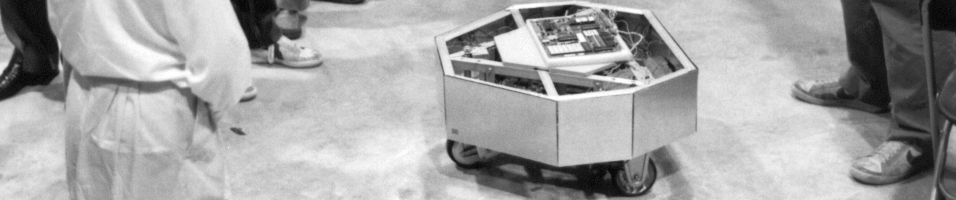
Between the January 1982 entries and this one, I attached the SYM-1 computer, modified; typed in; and debugged the self-direction program, and attached the outer frame; impact sensors; and impact sensor circuitry. I was unable to get Tod’s impact sensor program (written for the KIM) modified to work on the SYM, but I entered the 1983 state science fair anyway. My entry was one of two robots in the fair, we both won Second Award.

Microtron remained in this state until the late 1990s, when I decided to restore and refit the robot – and to at least get the impact bumpers and ultrasonic functionality working. This effort is currently underway.


 "How to build a computer-controlled robot" (amazon)
"How to build a computer-controlled robot" (amazon) 1977 Interface Age Article (pdf)
1977 Interface Age Article (pdf) ZagrosRobotics
ZagrosRobotics .nu
.nu